Nous avons décidé de faire un plan en trois parties pour notre présentation :
Introduction
Recherche et dévelloppement
Conception et réalisation
Sujet
Le but du projet est de réaliser un "robot sumo" répondant aux exigences d'un cahier des charges précis. En effet, l'appareil doit être capable de se déplacer dans la surface du dohyo (zone de combat) sans en sortir, et doit aussi être capable de détecter son adversaire et de le pousser hors de la zone. Chaque combat ne peut excéder une durée de 3mn.
Problématique
Quels choix technologiques doit-on faire pour satisfaire au cahier des charges ?
Il va s'agir de choisir les meilleurs compromis entre différentes contraintes (vitesse/poids, solidité…), pour que, par exemple, le robot dispose de la puissance nécessaire en phase de confrontation, sans pour autant perdre en autonomie. D'autre part, la machine doit être suffisamment solide pour préserver ses composants internes, sans excéder le poids règlementaire.
Cahier des charges
Source d'énergie : électrique, par batterie rechargeable embarquée 9V.
Autonomie : 15 minutes minimum en combat (Pour assurer 5 combats de 3mn).
Vitesse de déplacement : comprise entre 2 cm.s-1 et 10 cm.s-1
Charge embarquée : il supporte tout ce qui le constitue mécaniquement, le matériel
électronique, électrique et la batterie. Sa masse totale doit être inférieure à 1,5 kg.
Microcontrôleur : PIC 16F877
Détection : 2 capteurs IF, un analogique et un numérique
Programme : le robot doit être en mesure de se déplacer sans sortir du dohyo et de pousser le robot adverse hors de la zone de combat.
Règlement
Pour mieux comprendre les tournois de robots sumo, nous avons lu le règlement pour mieux déterminer certains choix technologiques, comme les dimensions et les matériaux du robot.
Nous avons donc selectionné les règles les plus importantes :
Le robot doit être totalement autonome lors des combats
Le dohyo est un cercle de 77cm de diamètre, sa surface est lisse et peinte en noir mat.
Le bord extérieur est indiqué par un cercle blanc de 2,5cm d'épaisseur.
Déroulé des séances
Séances
Travail effectué
1
Prise de connaissance du principe et des règles du PPE. Tirage au sort du robot. Découverte des documents ressources.
2
Travail de recherches sur les robots sumos. Premiers plans, premières idées.
3
Début de la construction (plaque, percages). Début du programme de déplacement. Etude du fonctionnement des moteurs, des capteurs.
4
Cablâge des cartes et des moteurs. Perfectionnement du programme de déplacement.
Une carroserie en bois tout autour du robot pour protéger les cartes et les moteurs.
Le poids
Aller à l'essentiel de façon à alléger au maximum, faire des trous dans la carroserie si nécéssaire…
Gérer la confrontation
Un parebuffle incliné en plastique souple à l'avant.
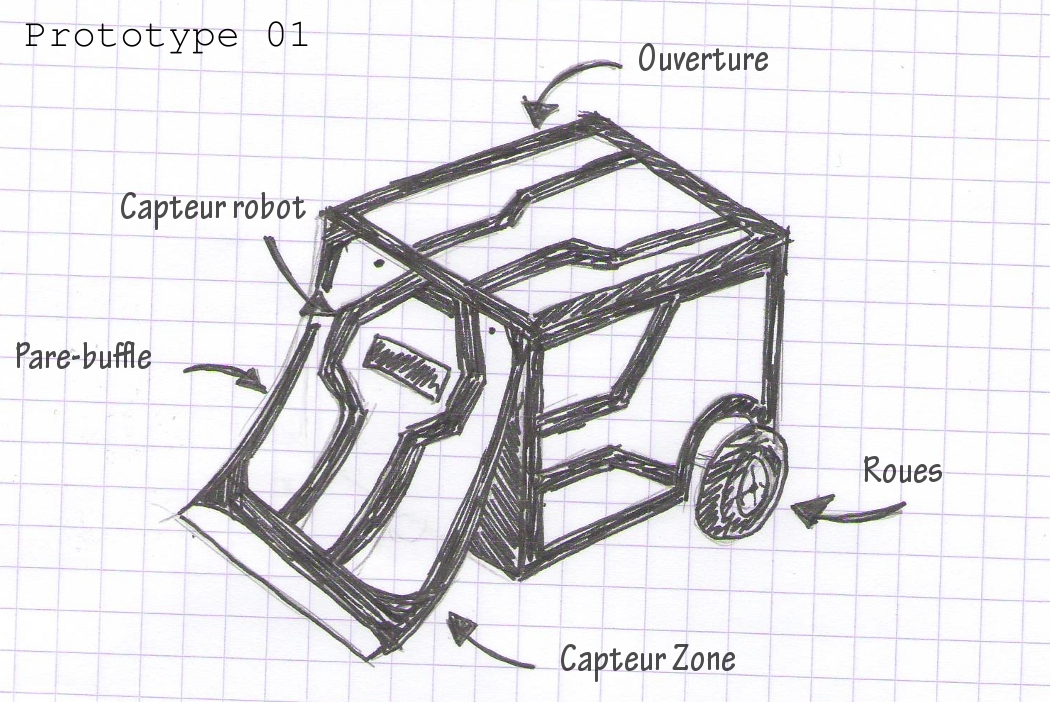
Prototype
Prototype
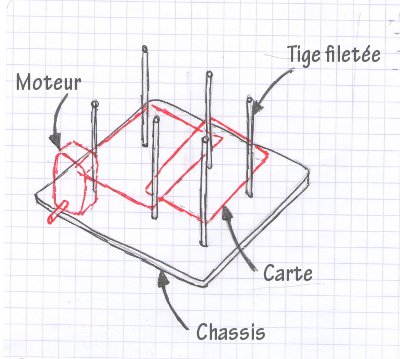
Fixations
On a choisi de réaliser le chassis de forme rectangulaire pour maximiser la place disponible pour les composants. Sur cette plaque de bois, on implante un "échafaudage" à base de tiges filetées, pour laisser suffisamment d'espaces entre les cartes et les moteurs.
Prototype
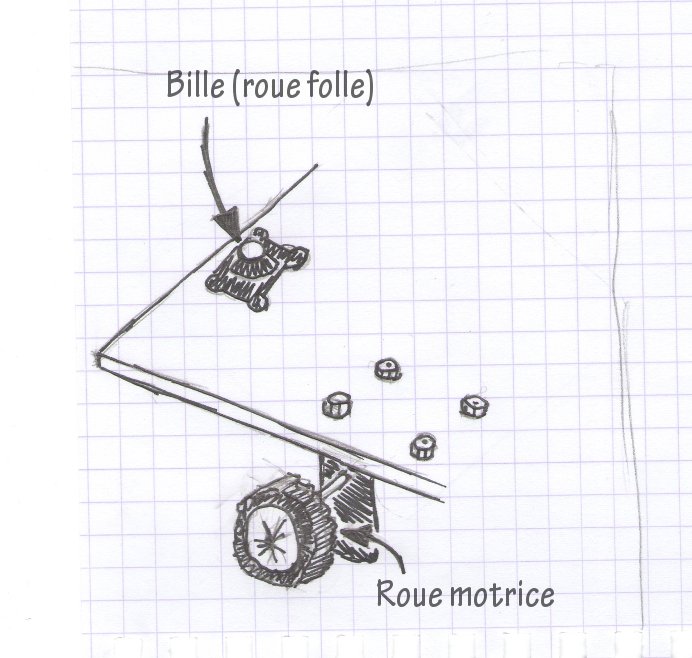
Déplacement
Disposant de deux moteurs, nous avons tout simplement décidé d'affecter un moteur par roue. Ainsi ce sont ces 2 roues, disposées de part et d'autre du robot, qui lui permettent de se diriger. Enfin, pour équilibrer l'ensemble, nous avons décidé de placer une bille en guise de roue folle à l'avant de l'appareil.
Prototype
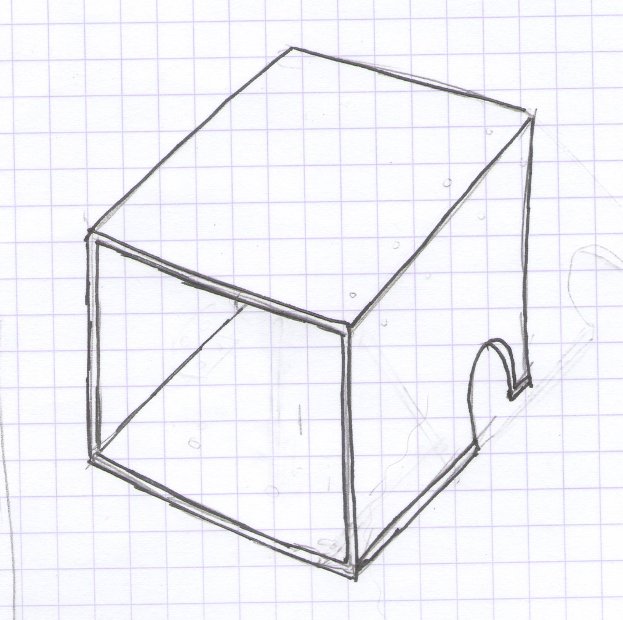
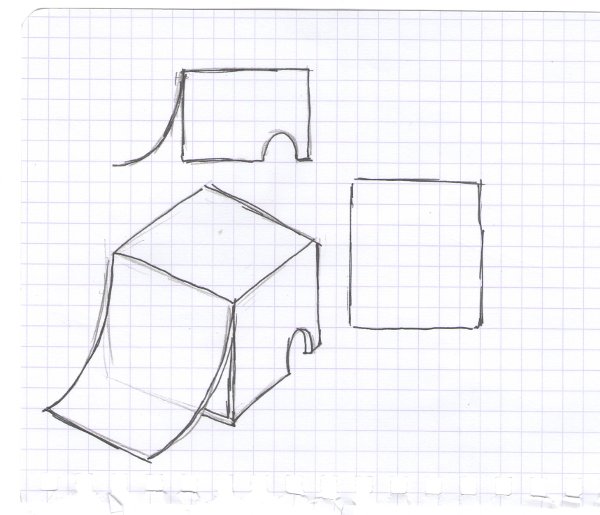
Carrosserie
Nous avons finalement décidé d'opter pour une carrosserie de forme parallélipédique. Cela permet ainsi de minimiser la taille et le poids, et de ne pas complexifier la phase de réalisation.
Prototype
Pare-buffle
Nous avons opté pour un pare-buffle, disposé à l'avant du robot, afin d'améliorer sa résistance et ses performances de combat : cette forme inclinée empêche l'adversaire de se glisser sous le robot, et constitue aussi un bon moyen de déséquilibrer l'adversaire, quand le robot le glisse sous son opposant. Nous avons décidé de le réaliser en plastique souple afin d'obtenir une forme courbe, qui rejoint le sol.
Intelligence artificielle
Ce robot doit être capable de pouvoir sortir son adversaire sans franchir la limite. Donc pour cela il a fallu concevoir un programme en conséquences, autrement dit, le robot doit être en mesure d'agir en toutes circonstances pour ne pas se faire éliminer. Dans le cas ou le robot détecte la limite, il va reculer et continuer a chercher son adversaire. Si le robot détecte son adversaire il va aller dans sa direction pour l'éjecter, sauf s'il rencontre la limite du Dohyo dans ce cas il reculera pour ne pas sortir.
Fonctionnement global
Diagramme Fast
Conception & Réalisation
Câblage
Le câblage est la partie inévitable à accomplir pour permettre le bon fonctionnement d'un robot. En effet cette partie
consiste à relier physiquement les divers composants entre eux pour qu'ils puissent communiquer.
Nous pourrons diviser cette partie en plusieures étapes :
identification des composants à l'aide des documents techniques.
rassemblement du matériel.
ajustements et câblage.
Câblage
Identification
Il s'agit en prmier lieux de faire l'identification des composants , en effet pour parvenir à construire notre robot nos professeurs nous ont fournit les
equipements electroniques nécéssaires :
un microcontrôlleur PIC 16F877, le "cerveau" du robot, c'est lui qui prend les décisions
une carte micro contrôlleur, elle executera les ordres du Microcontrôlleur
deux moteurs à courant continu :
-maximum d'engrenage permettant ainsi une meilleure poussée au dépit de la vitesse
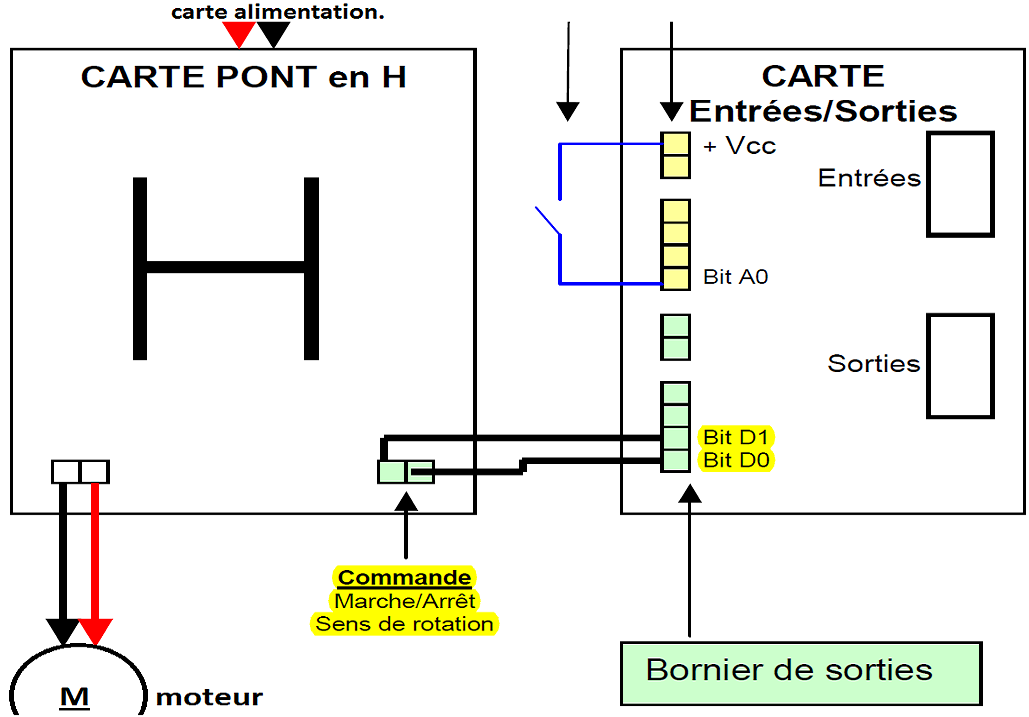
deux cartes pont en H qui serviront à controller le moteur entre plusieurs modes de
déplacements qui seront AVANCER RECULER et TOURNER
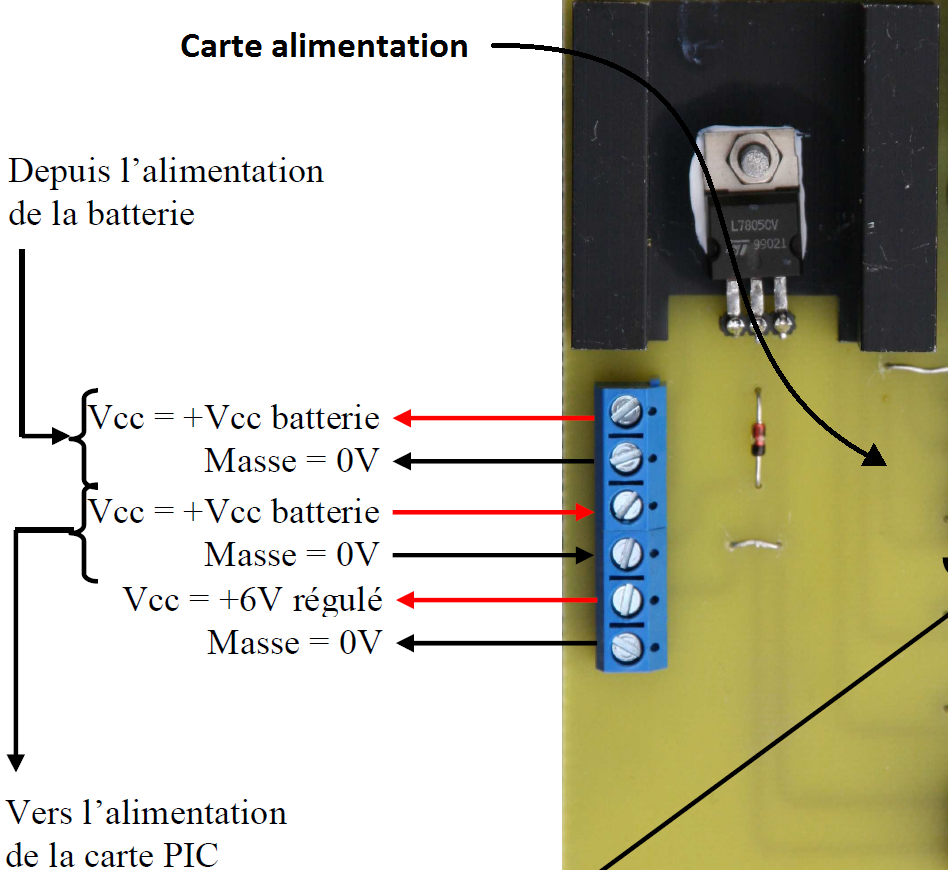
une carte alim, celle qui va distribuer l'alimentation au sein du robot
Câblage
Identification
un capteur infra rouge LOGIQUE TOR (tout ou rien)
- il sera utilisé pour la détection du bord du Dohyo.
- il délivre une information logique (TOUT OU RIEN) 1 ou 0
un capteur infra rouge ANALOGIQUE
- il sera utilisé pour la détection du robot adverse.
- il délivre une information en fonction de la distance de détection, l'information sera récupérée
en tension
une carte Bornier :
-elle reliera les entrée/sortie du PIC aux ports d'entrées/sortie de la carte reliés
aux capteurs
Câblage
Materiel
En effet pour mener a bien le cablage du robot il a fallut préparer notre équipement :
la panopelie de pinces:
pinces coupantes
pinces plates
pinces à dénuder
des fils/cables ou va circuler la tension :
petits fils pour les "information"
gros fils pour la circulation de la tension de la batterie, pour éviter que les fils ne surchauffe
un fer à souder.
du fil d'étain.
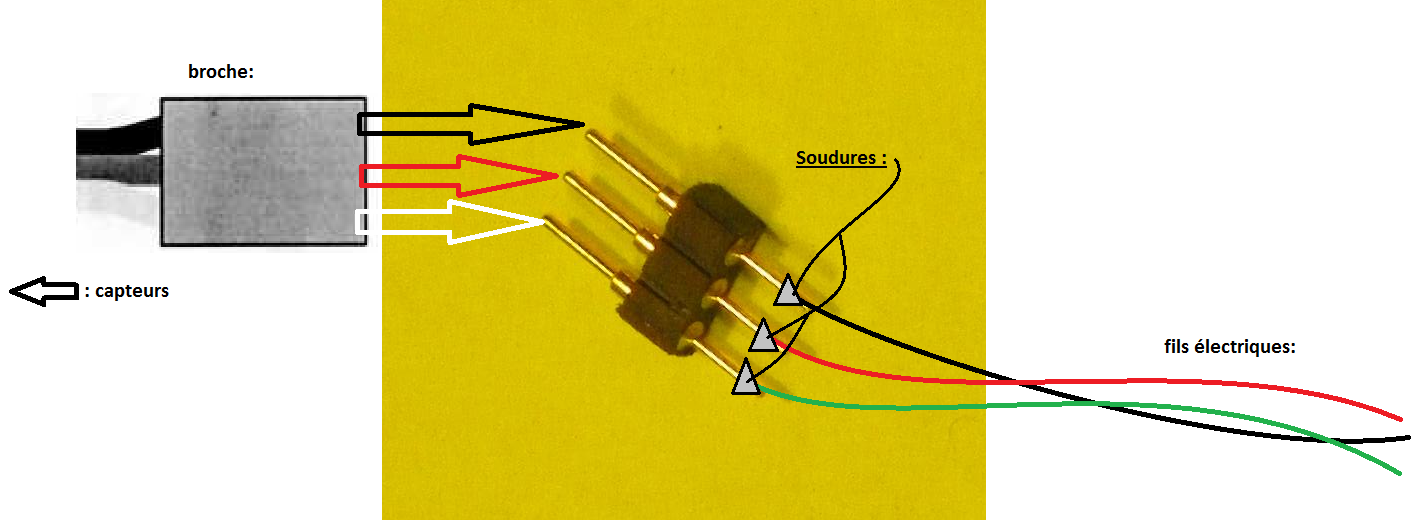
deux petites broches 3 pin male
un oscilloscope pour tester les capteurs
Câblage
Ajustements & câblage
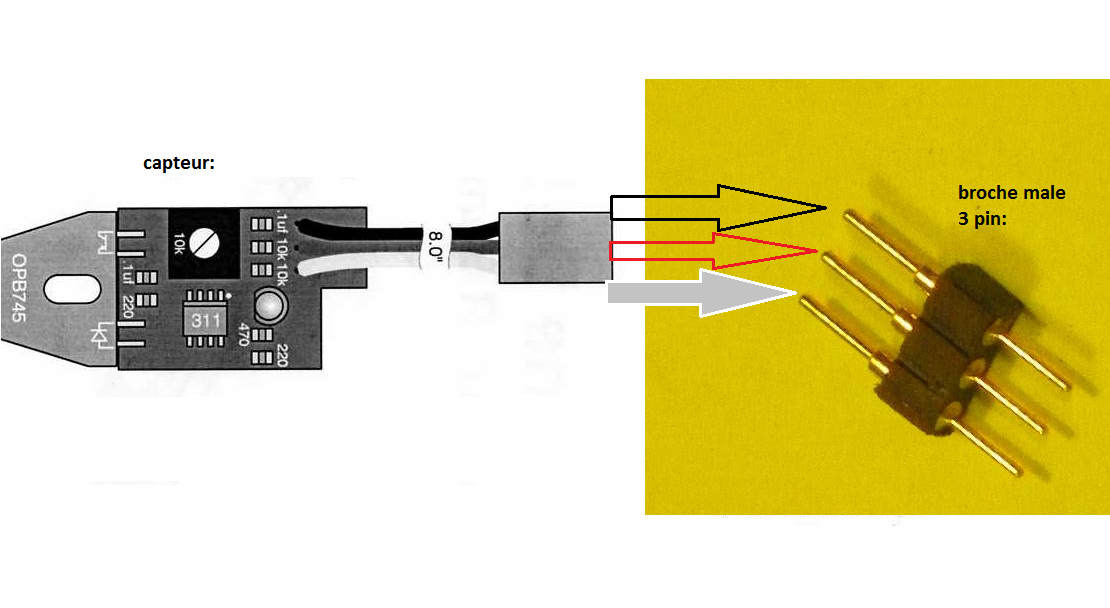
Capteurs :
mise en place de broches 3 pin sur les capteurs
Câblage
Ajustements & câblage
soudure des cables fins sur les broches des capteurs
installation du chatterton pour une meilleure isolation
Câblage
Ajustements & câblage
Test des capteurs à l'aide d'un Oscilloscope pour vérifier leur bon fonctionnement.
Câblage
Ajustements & câblage
Relier le cable d'alimentation de la batterie et de la carte PIC à la carte Alim.
Câblage
Ajustements & câblage
Relier les moteurs aux Ponts en H respectifs :
Câblage
Ajustements & câblage
branchement du capteur infra rouge du bord du Doyho (LOGIQUE) - alim vers (+) Vcc (-) Masse et la détection TOR (tout ou rien) Bit A1
branchemnt du capteur infra rouge de distance (ANALOGIQUE)
- alim vers (+) Vcc (-) Masse et la détection Bit A0
installation des nappes HE10 :
- entrées connectée au port A
- sorties connectées au port D
VERIFICATION des branchements
Montage
Montage
Conception de la plaque
La première étape du montage est la conception du chassis, qui servira à accueillir tout les composants et à soutenir l'ensemble du robot. À l'aide d'une scie, on découpe une plaque rectangulaire. Ensuite on perce des trous aux emplacements qui accueilleront les tiges filetées et les moteurs.
Montage
Cartes et moteurs
Avec des boulons, des vis, des rondelles et des tiges filetées, on crée le squelette du robot. Ensuite on monte dessus les cartes et les moteurs.
Montage
Déplacement
Pour que le robot puisse se déplacer, il ne nous reste plus qu'à ajouter une roue folle en plus des deux roues motrices fixées au moteur. Ainsi le robot dispose de trois appuis, ce qui lui permet donc de rester stable et de pouvoir se déplacer.
Montage
Capteurs
On doit ensuite ajouter les capteurs à notre robot, c'est la dernière étape pour qu'il soit en mesure de combatre de façon autonome. On place le capteur de zone à l'avant du robot en dessus de la plaque. Pour le capteur IR, nous l'avions tout d'abord placé en haut à l'avant du robot de façon à ce qu'il capte le robot adverse.
Montage
Bilan
Ainsi, notre robot est maintenant doté de tous les composants nécéssaires pour fonctionner :
Programmation
Dans la partie de la présentation intitulée Intelligence artificielle j’ai expliqué dans les grandes lignes le fonctionnement de notre robot, dans cette partie je vais expliquer en détail le programme permettant au robot de fonctionner comme on le désirait.
Programmation
Étape 1
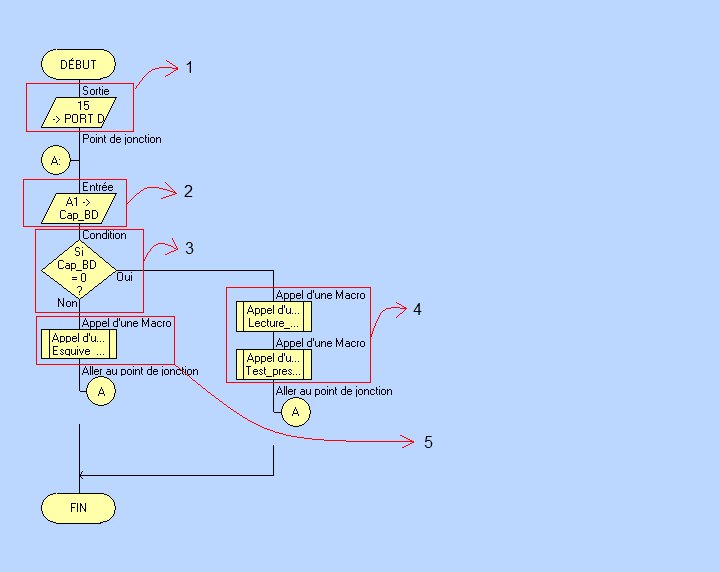
Sur le document joint on peut voir le programme de notre robot, il est divisé en 5 parties :
Initialisation du robot : Envoi de l’état logique 1 dans les 4 bits commandant les moteurs pour que ces derniers ne se lancent pas de manière indésirable.
Programmation
Étape 2
Sur le document joint on peut voir le programme de notre robot, il est divisé en 5 parties :
Lecture du capteur de limite : Récupération de l’état logique du capteur qui a pour rôle de détecter la limite du dohyo.
Programmation
Étape 3
Sur le document joint on peut voir le programme de notre robot, il est divisé en 5 parties :
Test de l’état logique du capteur de limite : Si le capteur de limite renvoie l’état logique 0 alors le robot va suivre les ordres contenus dans la partie 4, et si le capteur renvoie l’état logique 1 alors le robot va suivre les ordres contenus dans la partie 5. ( La partie 4 et 5 seront expliquées ci-dessous).
Programmation
Étape 4
Sur le document joint on peut voir le programme de notre robot, il est divisé en 5 parties :
Réaction si absence de la limite : Dans cette partie, on peut observer deux « macros » ou sous programmes. Le premier sous programme de cette partie consiste a lire la tension que va renvoyer le capteur censé détecter l’adversaire et de la convertir en un nombre compris en 0 et 255. Le second sous programme va tester la valeur préalablement convertie et agir en fonction de. Soit le robot avancera vers son adversaire car la valeur indiquera que l’adversaire est détecté soit il continuera a tourner sur lui-même afin de trouver son adversaire.
Programmation
Étape 5
Sur le document joint on peut voir le programme de notre robot, il est divisé en 5 parties :
Réaction si détection de la limite : Cette partie ne contient qu’un seul sous programme qui va faire réagir le robot de manière a ne pas sortir du dohyo car le capteur de limite aura détecté la limite. Cette réaction consiste a faire dans un premier temps reculer le robot puis a le faire tourner sur lui-même un quelques secondes afin de l’éloigner de la limite et donc d’une défaite indésirable.
Les premiers tests
Après avoir terminé la base de notre robot, nous avons effectué quelques tests (sensibilité des capteurs notamment) :
( Ici une vidéo … )
Finitions
Maintenant que notre robot est opérationnelle, il ne nous reste plus qu'à faire les finitions : ajuster les capteurs, ajouter la carroserie, la peinture…
Finitions
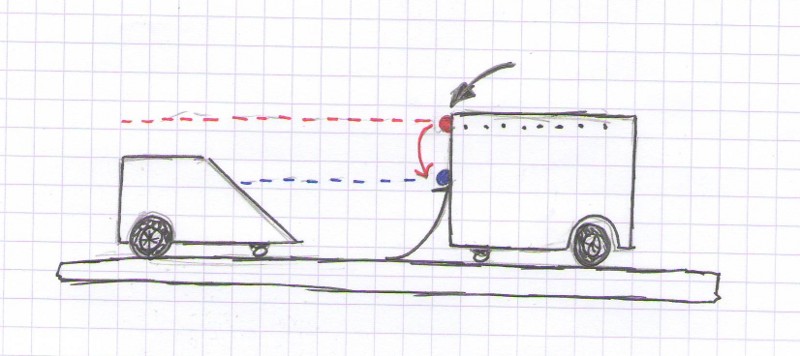
Capteurs
A l'issue des tests, en ayant reglé la sensibilité des capteurs, nous nous sommes aperçu que le capteur IR était trop haut pour détecter correctement son adversaire. Nous l'avons donc baissé de quelques centimètres, pour de meilleures performances.
Finitions
Carrosserie
Nous avons aussi ajouté la carroserie du robot, afin qu'il soit plus solide, et plus esthétique…
Finitions
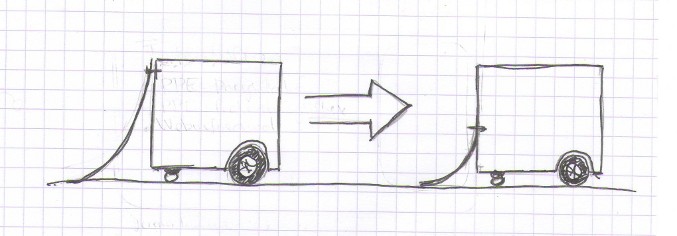
Parebuffle
On a décidé de faire un parebuffle plus petit afin de mieux protéger l'avant, et que l'ensemble soit plus solide. En effet, un parebuffle en plastique souple sur tout l'avant serait trop fragile, et ne pourrait assurer correctement la protection des capteurs. De plus cela gènerais la "vision" du robot.
Finitions
Peinture
La peinture n'est certes pas une partie primordiale, elle n'est d'ailleurs même pas nécéssaire, mais nous avons pensé que cela apporterait un "plus" au robot. Nous l'avons donc peint en blanc, puis nous avons ajouter des motifs avec du scotch.